Scratch Built Remote Control Truck
This project was done as a high school science fair engineering project in 2014 and 2015. It is one of the most ambitious projects I have taken on; despite succeeding I was never happy with the outcome, so it has remained in the back of my head and I continually work on it. I learned so much that I can hardly write it all down. This was my first experience with CAD design, welding, designing for technical criteria, and so much more.
The build is documented in details on RCCrawler, a forum dedicated to remote control trucks and a highly valuable community learning resource. Enthusiastic about desert race trucks and prerunners at the time, I wanted to build my own. I was inspired by other people online (cyconxc) who proved you could get both scale looks and great performance out of custom built trucks.
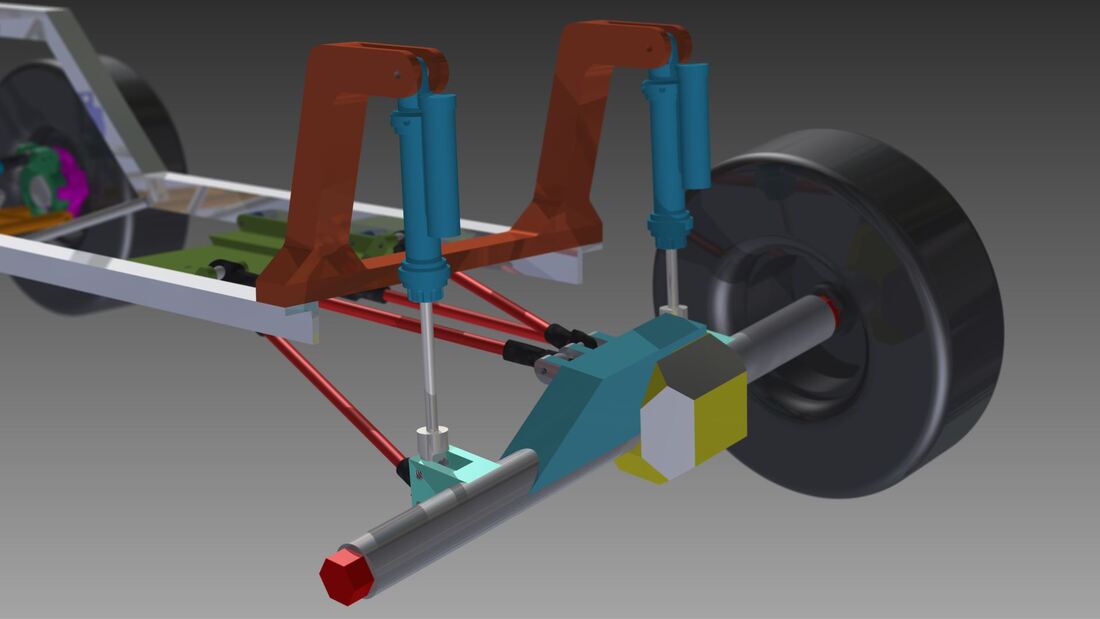
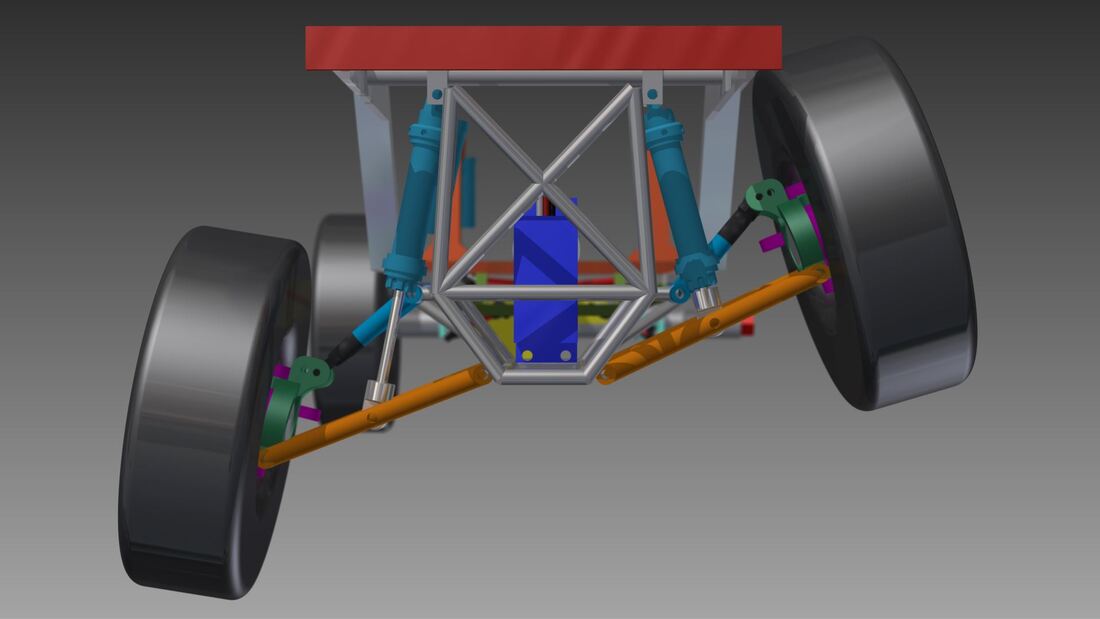
The prototype is designed for three criteria: performance, durability, and scale realism. Performance is dictated by suspension geometry: it must have generous wheel travel to absorb large impacts while controlling the wheel’s camber and caster with minimal bump-steer. These all affect how the tire grips the surface and how the truck reacts to cornering and acceleration. The prototype is made mainly of metal to be durable. The suspension and chassis must look realistic, or at least similar to what a full size truck would have. I started by researching and designing the chassis and suspension, settling on short-long arm in the front and triangulated four link on the rear axle.
The build is documented in details on RCCrawler, a forum dedicated to remote control trucks and a highly valuable community learning resource. Enthusiastic about desert race trucks and prerunners at the time, I wanted to build my own. I was inspired by other people online (cyconxc) who proved you could get both scale looks and great performance out of custom built trucks.
The prototype is designed for three criteria: performance, durability, and scale realism. Performance is dictated by suspension geometry: it must have generous wheel travel to absorb large impacts while controlling the wheel’s camber and caster with minimal bump-steer. These all affect how the tire grips the surface and how the truck reacts to cornering and acceleration. The prototype is made mainly of metal to be durable. The suspension and chassis must look realistic, or at least similar to what a full size truck would have. I started by researching and designing the chassis and suspension, settling on short-long arm in the front and triangulated four link on the rear axle.

Creating the chassis and all parts in Autodesk Inventor let me iterate designs quickly and cheaply. I spent over 250 hours on this CAD model.
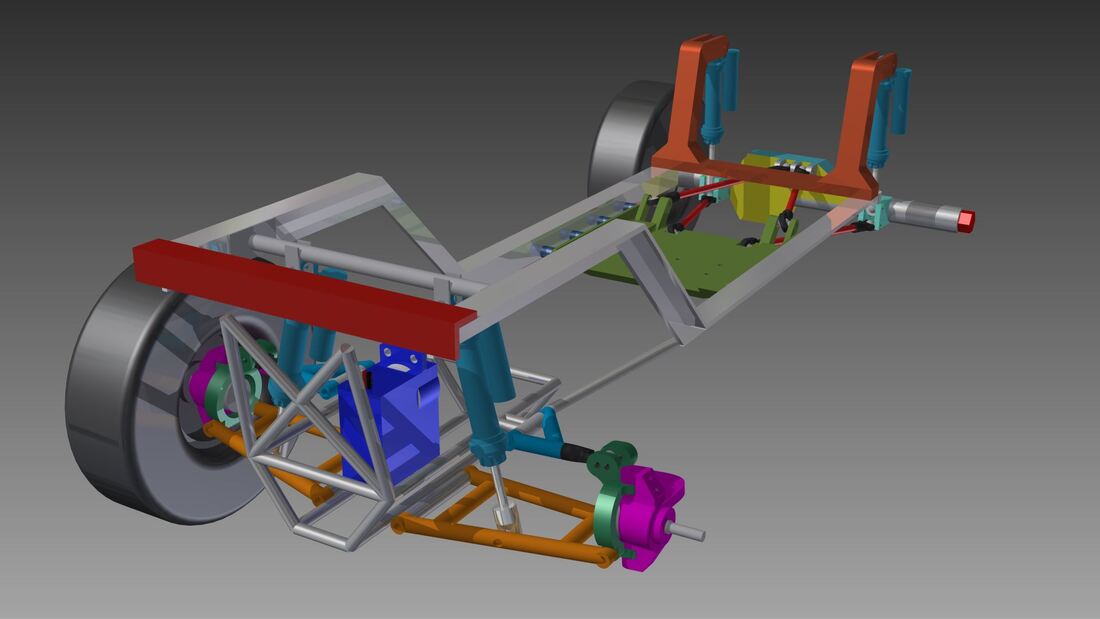
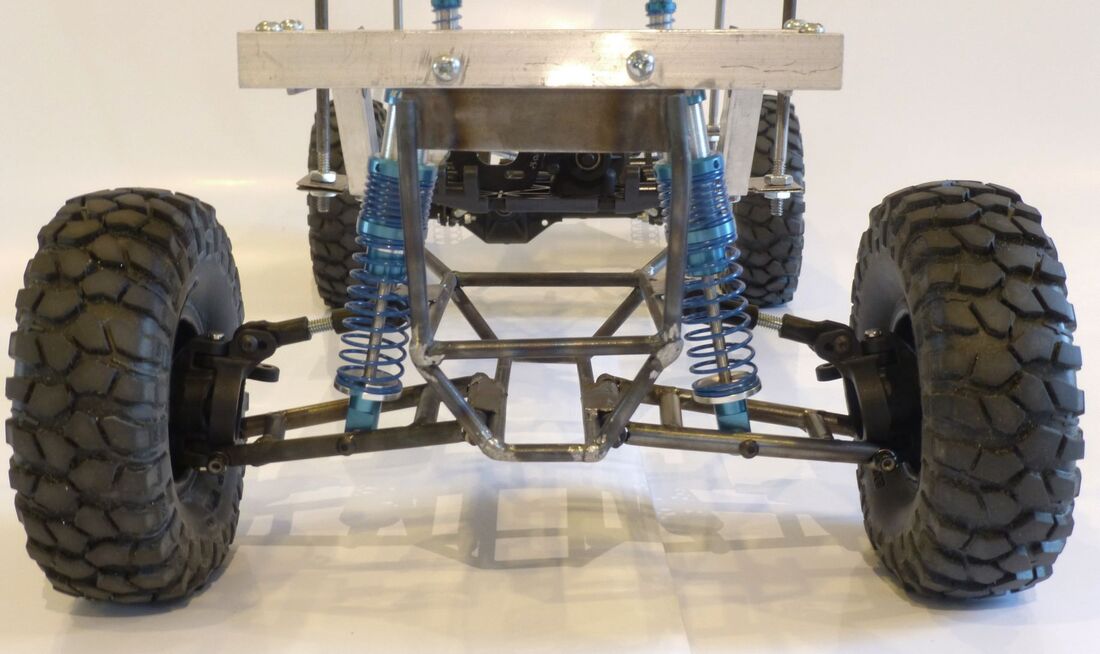
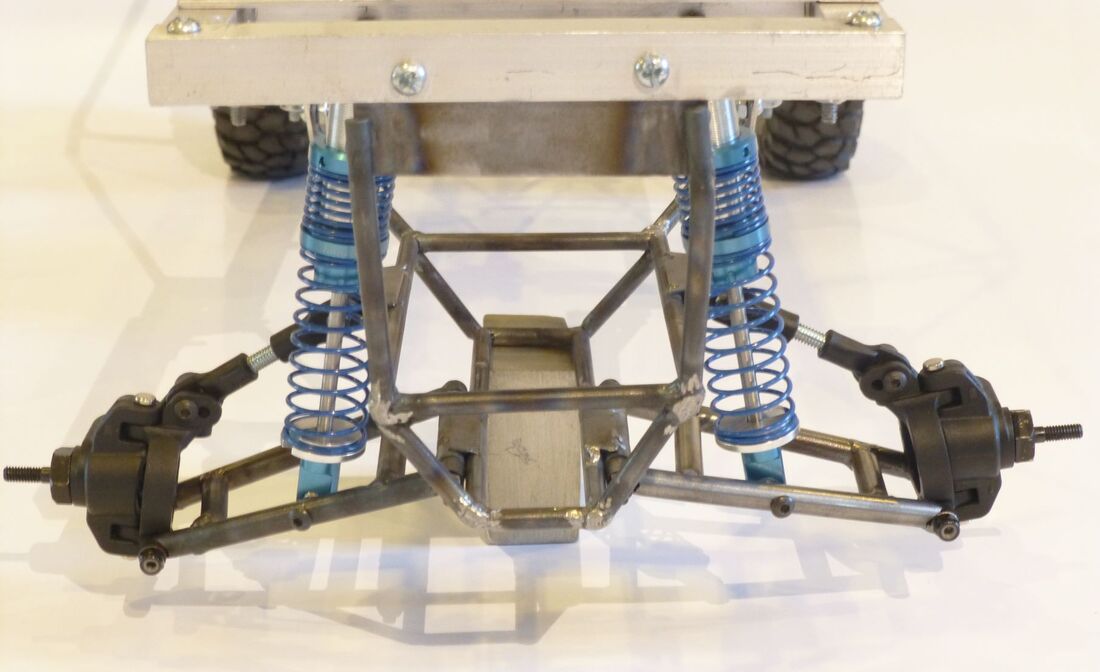
My next major lesson was how not designing for manufacture cripples the manufacturing process. I lost count of how many parts I designed that I could not construct and how many revisions the model went through. Finally I ended up here, with a functional suspension. The truck still lacked steering and a drivetrain but those would come later.
I achieved 2.5" and 2" of travel in the front and rear respectively. The front tires maintain zero or negative camber until full compression. Unfortunately there is a fair amount of bump steer due to limitations of the front knuckles and mounting the steering servo.
I achieved 2.5" and 2" of travel in the front and rear respectively. The front tires maintain zero or negative camber until full compression. Unfortunately there is a fair amount of bump steer due to limitations of the front knuckles and mounting the steering servo.



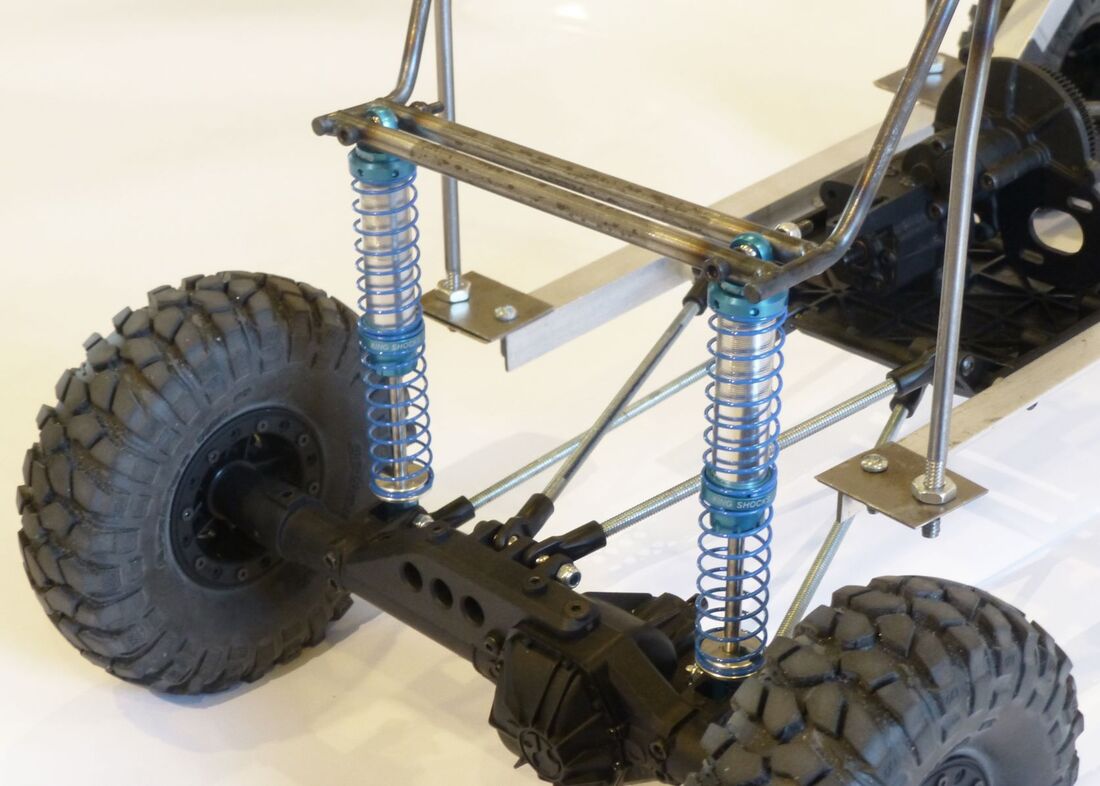
Countless hours of building, welding and assembling later I arrived at a functional remote control truck! It looks similar to the mechanics of full-size race trucks, and performs well in jumps. I can be heard saying "it needs a swaybar" while driving it because the center of gravity is high and it has low roll stiffness.
|
|
|
I drove it so hard the motor burned out on the first outing. Another lesson learned: cooling is essential for high powered electronics. I was never really satisfied with the driving dynamics and performance of the front suspension. It drove, which was a huge win in itself, but roll stiffness, steering geometry, excess weight, and the fact I built the front end crooked were just some of the reasons I feel this project fell short of my capabilities.
